新加坡和日本的科學家們合作取得了一項重大突破,聯合研發出一種能夠控制半機械昆蟲群的技術,有效防止這些昆蟲在複雜地形中受困。這一技術將使科學家能夠利用蟑螂等昆蟲的卓越爬行能力,執行設施檢查、廢墟搜救等任務.

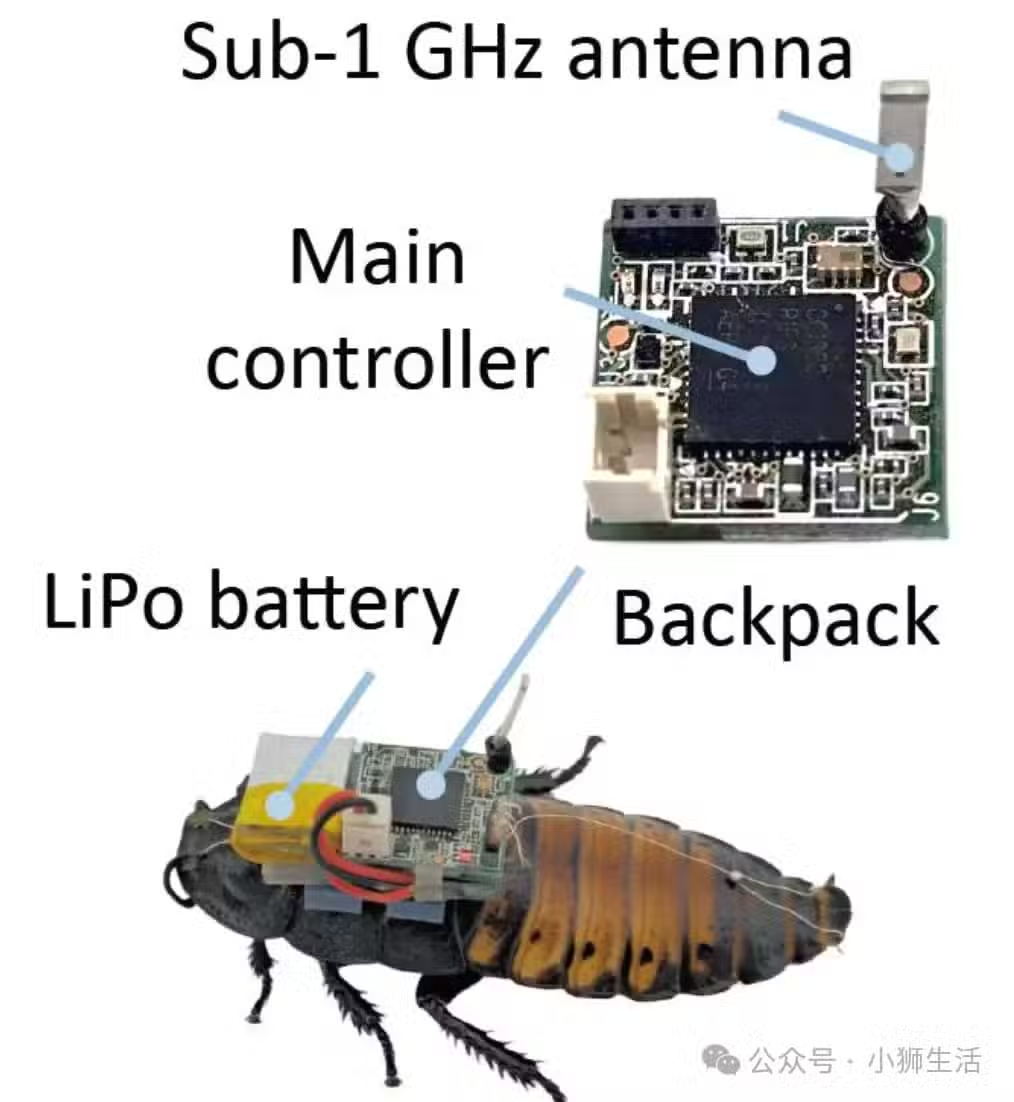
半機械昆蟲(Cyborg insects)是在活體昆蟲背上裝上微小的電子設備,如光學傳感器、紅外攝像機、電池和通信天線,從而實現對其行動的遠程控制,以完成特定的檢查、搜救等任務.南洋理工大學、大阪大學和廣島大學於1月6日聯合發布文告稱,科學家們在蟲群機器人技術上取得了重大進展,開發出了一種先進的蟲群導航算法,能夠在救災、搜救和基礎設施檢測等任務中發揮重要作用. 在研究中,科學家們在馬達加斯加發聲蟑螂(Madagascar hissing cockroaches)背上安裝了輕型電路板、傳感器和可充電電池,形成了一個自主導航系統,幫助它們在所處環境中自由穿行,並為其朝目標行進提供指引.通過算法指定昆蟲的領隊,領隊能夠通知其他昆蟲目的地方向,並協調引導整個蟲群移動.實驗結果顯示,新蟲群算法使半機械昆蟲的移動更加自由,顯著降低了被障礙物卡住的風險,附近的半機械昆蟲也能協助解救被卡住或翻仰的昆蟲.
與傳統機器人相比,半機械昆蟲具有更低的能耗.昆蟲本身具備運動能力,因此在方向指引上只需施加微小的電流,就能產生特定刺激,引導昆蟲朝特定方向前進.當與蟲群控制算法相結合時,昆蟲的移動需求可減少約50%.昆蟲的本能使它們能夠快速適應複雜的地形和環境變化,獨立地穿越障礙物. 南大教授佐藤隆(Hirotaka Sato)指出:「要高效地開展搜索和檢查行動,往往需要勘測大片區域,並穿越充滿挑戰和障礙的地形.一旦半機械昆蟲背包上的傳感器探測到目標,如搜救任務中的人類或基礎設施中的結構缺陷,它們就能通過無線方式向控制系統發出警報.」這項研究成果已在英國科學雜誌《自然通訊》上發表,有望在搜救任務、基礎設施檢查和環境監測等領域發揮重要作用,彌補傳統機器人在複雜或狹窄空間作業的不足.