
導語:近日,新加坡科技大學的機器人專家公布了一種新型的仿生無人機,可以藉助風力降落在指定位置,無需電力提供動能。
智東西7月9日消息,近日,新加坡科技大學的機器人專家在IEEE Robotics and Automation Letters上發表了一篇新論文,介紹了他們研發的新型無人機,這種無人機由5架單獨的無人機連接在一起,在接近地面時,驅動翼控制它們彼此分離,分別降落在各自的目標地點。
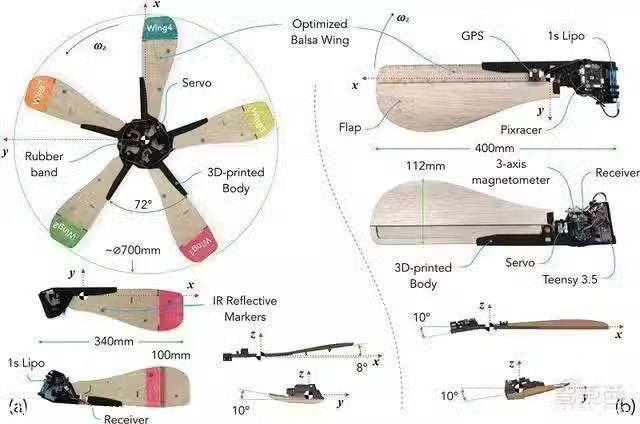
這種設計的特點是,無人機不再需要電力提供動能,在下降的初始階段,5架無人機藉助風力協同自轉,幾個機翼相互連接,形成一個旋轉中心。
多架無人機組合的形式,能夠實現更高的旋轉動能和協同控制能力。合體無人機接近地面後,它們就可以退出協作模式,繼續下降各自特定的目的地。
一、無人機分離後降落在指定位置
傳統的固定翼和四旋翼無人機結構相對複雜,價格也比較昂貴。當需要使用「一次性」無人機來完成某些工作時,固定翼和四旋翼無人機的成本就太高了,只使用一次也會造成很大的資源浪費。
研究人員從楓葉和翅果(翅果,又稱翼果,翅果的形狀使得風能夠將果實帶到離母樹很遠的地方。)隨風飄落的狀態找到了靈感,設計出了簡單的滑翔機式無人機。
楓葉和翅果的共同特點是,能夠隨著風旋轉飄落到地面,翅果的葉子就像幾個可以旋轉的翅膀,但它的下落過程是不能控制方向的,風往哪裡吹就降落在哪裡。
藉助翅果的特點製作無人機時,增加一個驅動翼,在正確的時機啟動它,就可以控制無人機落地的方向,瞄準地面上特定的點。當無人機到達指定位置後,五架單獨的「翅果」無人機就會同時分離,飛到各自的指定位置完成任務。
二、5架無人機協作控制飛行平衡
想要使無人機在空中飛行的過程中轉向不難實現,但很難做到穩定和精確控制。在研究人員發表的論文中,他們找到了解決無人機穩定轉向問題的辦法,就是同時使用5架無人機保持飛行的平衡。
目前,研究人員正在計劃改進這種小型無人機的設計,提高單架無人機和多翼協同無人機的旋轉速度和控制性能。
三、「翅果」無人機能夠軟著陸
每架無人機機翼的一部分,形成一個襟翼(特指現代機翼邊緣部分的一種翼面形可動裝置,其基本效用是在飛行中增加升力),可以在協同模式下同時啟動,有更好的機動性,將無人機的垂直和水平速度控制在一定程度上,導航到目標位置時輕輕的著陸。「翅果」無人機的設計就像一個空中有效載荷的減速器,就像降落傘一樣,它能確保從飛機上扔出去的東西完好無損的到達地面,不會在落地時被撞的粉碎。
翅果自動機翼無人機,可以攜帶小型的物品飛行,比如緊急醫療物品。視頻中的小型翅果無人機能夠額外負重30克,雖然沒有固定翼滑翔機的容量大,但它們能夠垂直下降,比降落傘更好控制。
結語:仿生無人機或將用於救災工作
新加坡科技大學的機器人專家,從植物的飄落中找到無人機的設計靈感,研發出了能控制降落地點的仿生無人機。這種無人機的設計能夠幫助運輸小型物品,比如在救災過程中,可以將緊急的醫療物品準確的送到指定地點,並保證運送物品完好無損。
研發人員正在完善這種小型仿生無人機的設計,提高控制性能,未來,這種仿生無人機或將能夠在救災、救援工作中發揮巨大作用。








